
I am a 4th-year Ph.D. student advised by Prof. Kuk-Jin Yoon at the Visual Intelligence Lab (VILab), Korea Advanced Institute of Science and Technology (KAIST).
My research centers on 3D scene understanding for autonomous driving and robotics, with a focus on building models that generalize and remain robust across diverse domains. I am also particularly interested in leveraging multiple sensing modalities, including LiDAR, cameras, and event cameras.
Publications
* denotes equal contribution.
-
-
-
-
-
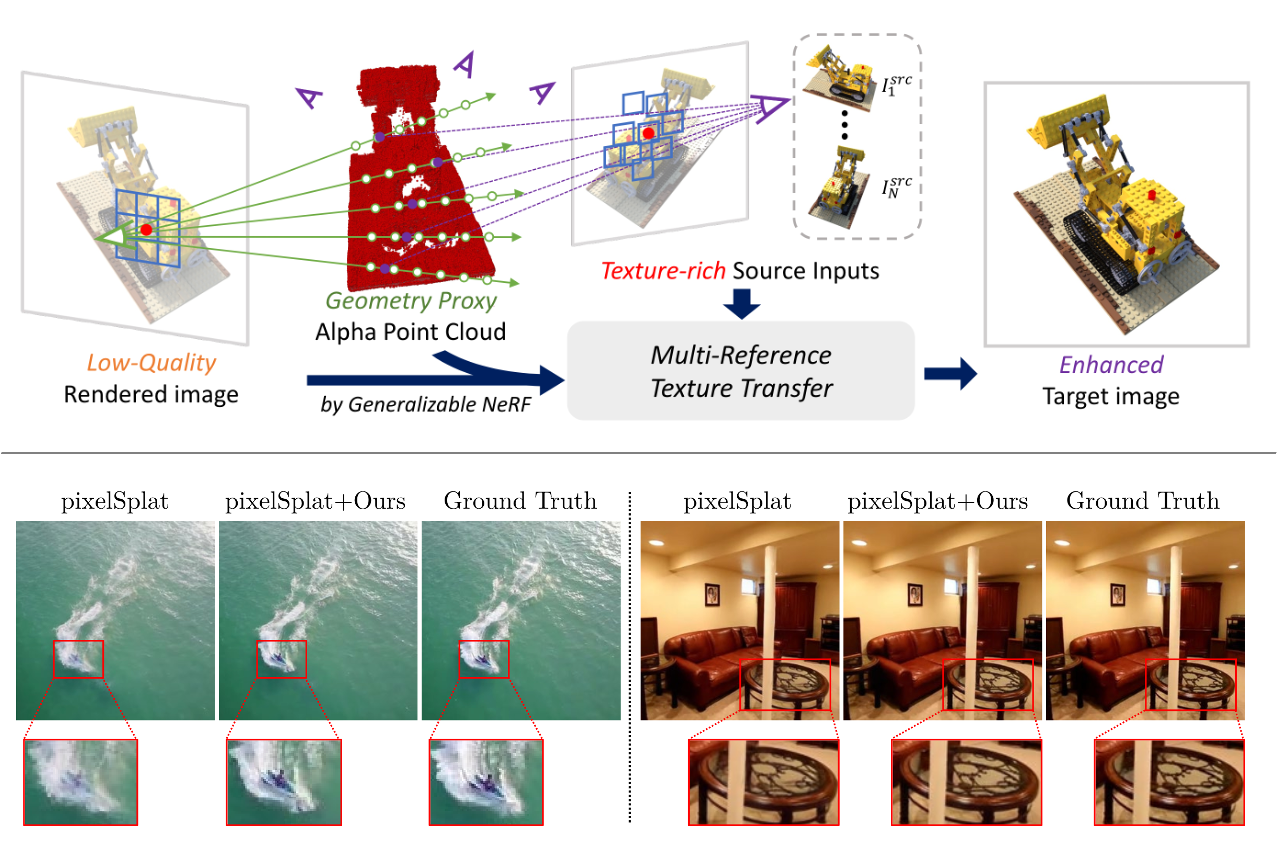
GMT: Enhancing Generalizable Neural Rendering via Geometry-Driven Multi-Reference Texture Transfer
ECCV 2024
-
Honors & Awards
- 2025Selected as a NeurIPS 2025 Top Reviewer
- 2023Gold Prize, Best Paper Awards, IPIU 2023 (35th Workshop on Image Processing and Image Understanding)
I have served as a reviewer for CVPR, ICCV, ECCV, and NeurIPS.
Projects
-
2025–
Autonomous Driving in Unstructured Off-Road Environments
Hanwha Aerospace
-
2025
Data Augmentation & Sensor Fusion for Robust Autonomous Driving
42dot
-
2024
Advisor for 2025 HMG Autonomous Driving Challenge
Hyundai Motor Group
-
2022–24
Intelligent X-ray Luggage Scanning System
Korea Customs Service